Projects
Reading time: 6 minutes and 24 seconds
Current projects
MarginDx
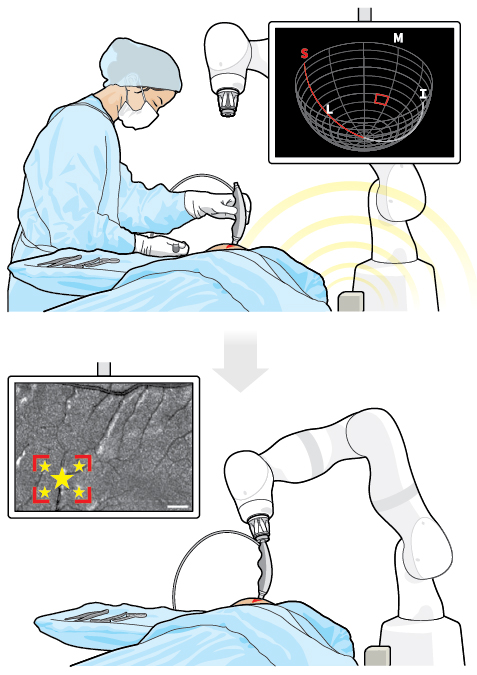
Real-time intraoperative assessment of cancer margins using advanced optical imaging and robotics techniques.
Overview
Margin Diagnostics (MarginDx), funded through the Advanced Research Funding Agency for Health (ARPA-H) Precision Surgical Interventions (PSI) program, combines optical imaging technologies with AI screening tools to ensure, in real time, that tumor tissue and cells are completely removed during surgery.
Individual Research Contributions
As the robo-optics lead, I am responsible for developing fundamental techniques and hardware required to bridge the gap between control theory and robotics, and biophotonics in in vivo imaging to operate under the effects of tissue deformation and motion. The project aims to develop a state-of-the-art device for high-resolution intraoperative optical imaging to enable cell-level identification of cancer margins and other forms of pathology, by leveraging nonlinear optical techniques and optical coherence tomography, coupled by adaptive precision robotic position and control. As part of my role, I have made the following contributions to the project:
Recessed Augmented Reality Markers (RAMs)
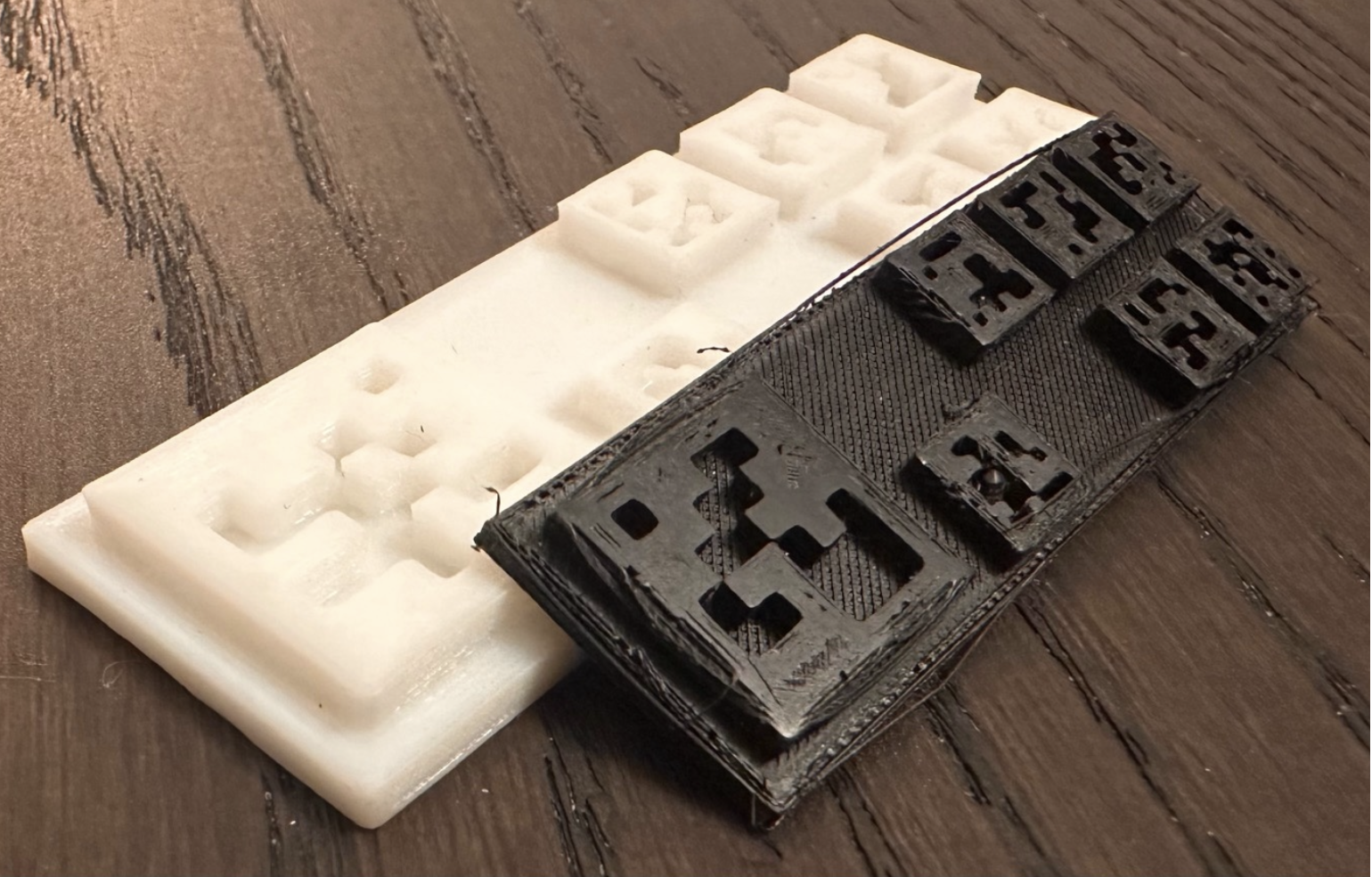
Enabling one-shot precision manipulation of everyday objects using visual and tactile sensing.
Recessed AR Markers (RAMs) provide a new way to enable precision robotic interactions with everyday objects, while still keeping them usable by humans—without the need for reinforcement learning. These markers have been validated in practice using GelSight Mini sensors, with a manuscript detailing these techniques currently under preparation.
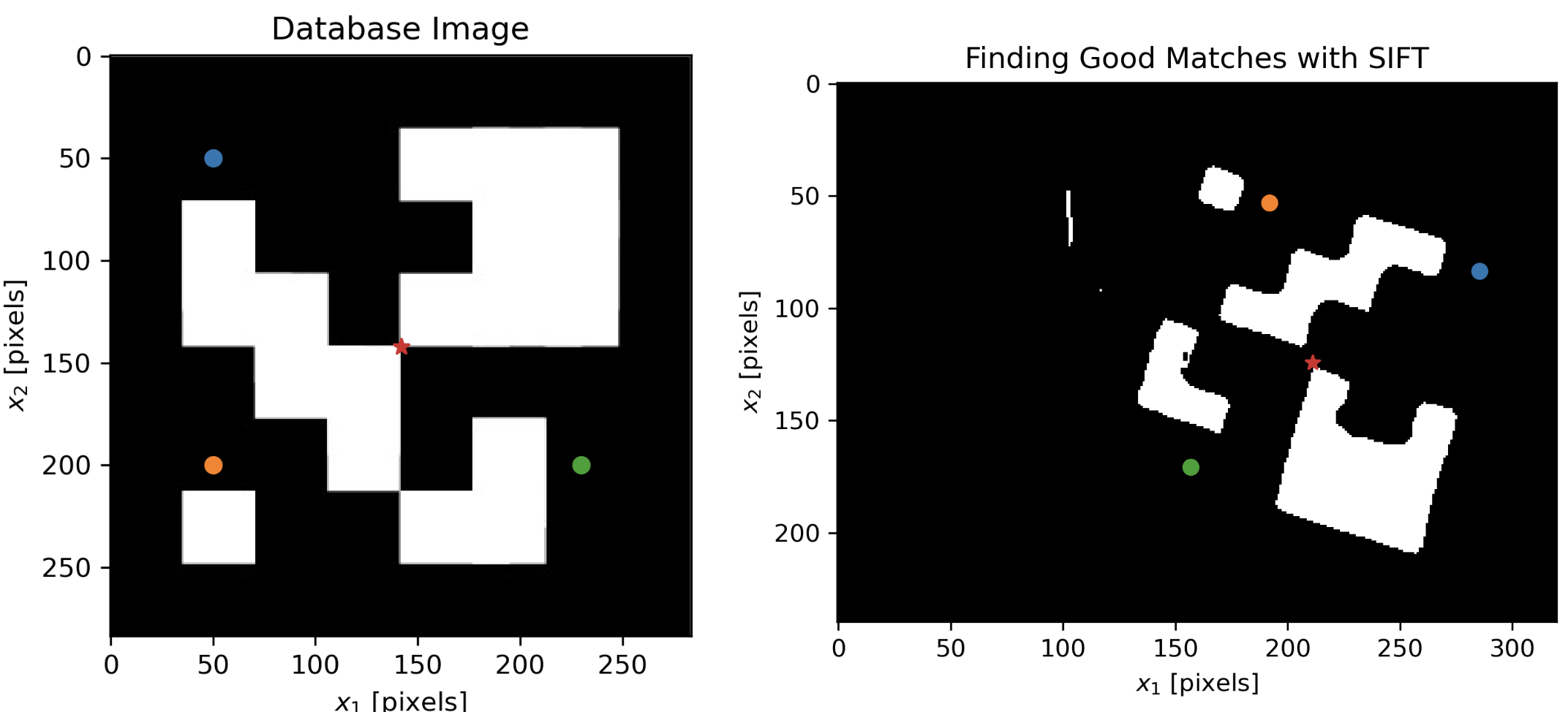 Rapid SIFT-based feature matching with database markers after preprocessing.
Rapid SIFT-based feature matching with database markers after preprocessing.
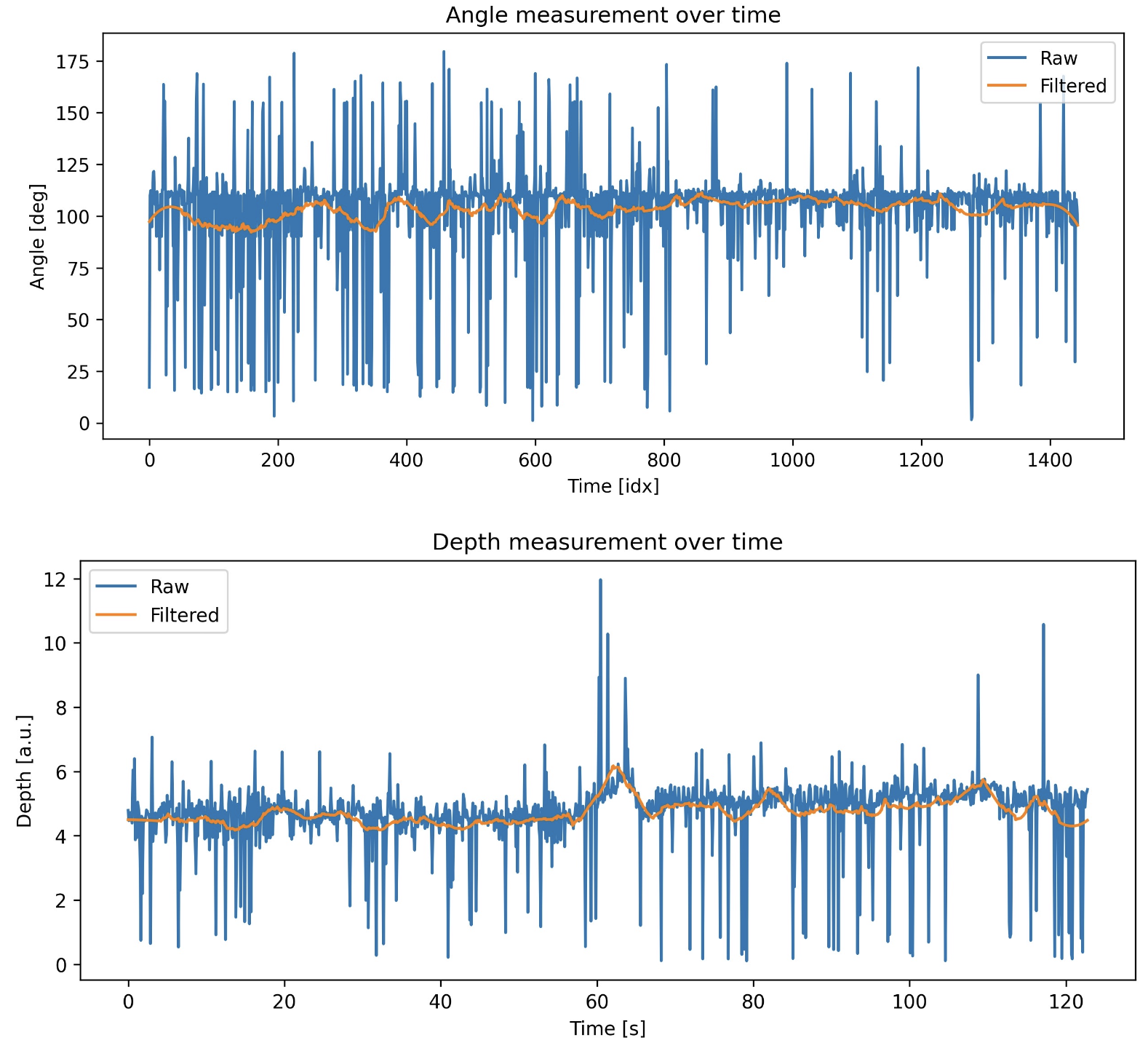 Spatiotemporal grasp tracking using RAMs and adaptive Savitzy-Golay filtering.
Spatiotemporal grasp tracking using RAMs and adaptive Savitzy-Golay filtering.
Lodestar
C++ digital guidance, navigation and control framework
Lodestar provides a user friendly platform-agnostic framework for real-time linear control of dynamic systems.
Overview
- Language: C++11 / Python (bindings)
- License: BSD-3
- Status: In active development.
- Website: https://lodestarengine.org ; https://theory.ldstr.dev .
The Lodestar framework [1] consists of several templates that allow for control of linear discrete time systems. The following features are implemented:
- Discrete-time linear time invariant systems modeling and control:
- Template-based object oriented framework for arbitrary finite dimensional linear systems
- Linear Quadratic Regulation (LQR)
- Linear Quadratic Estimation/Classical Kalman Filter (LQE/KF)
Planned features
The following capabilities are planned for Lodestar in the near future:
- Continuous to discrete time zero-order hold conversion
- Recursive algebraic Riccati equation (ARE) solver
- Recursive Least Squares (RLS) system identification
- Single-input single-output (SISO) Generalized Predictive Control (GPC)
- Spatial value functions (SVF) based guidance and path planning [2]
- Real-time plotting and performance evaluation (impulse, unit step repsonse, Bode/Nyquist plots) frontend
- Google Protocol Buffers-based message passing interface for real-time logging and command
- I/O interface for common sensors (e.g., IMUs, barometers, time-of-flight sensors) and servos (e.g., solenoids, brushless DC motors).
Links
- Lodestar is powered by:
- Eigen: http://eigen.tuxfamily.org/
- neither: https://github.com/LoopPerfect/neither
- Related projects:
- SLICOT (Subroutine Library in Systems and Control Theory): http://slicot.org/
- Control Toolbox: https://github.com/ethz-adrl/control-toolbox
References
[1] H. El-Kebir, J. Bentsman, and M. Ornik, “Lodestar: An Integrated Embedded Real-Time Control Engine,” in 2023 Conference on Control Technology and Applications. Bridgetown, Barbados: IEEE, 2023.
[2] Mettler, B., Dadkhah, N., and Kong, Z. “Agile Autonomous Guidance Using Spatial Value Functions.” Control Engineering Practice, Vol. 18, No. 7, 2010, pp. 773–788. doi:10.1016/j.conengprac.2010.02.013.
Knifefish
A light-weight framework for robotic electrosurgery
Knifefish is a framework for real-time control and simulation of electrosurgical processes, allowing for sensor data processing and feedback control.
Overview
- Language: C++11
- License: TBD
- Status: In active development
Past/shelved projects
Stratagem3D
A light-weight web-based game engine for 3D turn-based strategy games
Overview
- Language: Haxe/Kha
- License: TBD
- Status: Shelved
Extendible Orbit System 3D (EOS3D)
Lightweight orbital mechanics calculation and visualization suite based on matplotlib
Overview
- Language: Python
- License: MIT
- Status: Suspended
The eos3d library is a lightweight orbital mechanics calculation and visualization suite based on matplotlib. It includes orbit visualization, SPACETRACK Two-Line Element retrieval and current satellite position visualization, Solar System orbits and planetary position visualizations and real-time n-body simulations.
Documentation
The documentation of eos3d-mpl may be downloaded via the following link: documentation.
 English
English